(Finding the Eddy Current Force)
TOContents
Contents
Diagram 2.1
Data Table 2.1
Friction Results
Graph 2.1
Data Table 2.2
![]()
(Finding the Eddy Current Force)
TOContents
![]() Previous____Next
Previous____Next![]()
![]()
Contents
Diagram 2.1
Data Table 2.1
Friction Results
Graph 2.1
Data Table 2.2
![]()
My first plan was to use the motion of a pendulum and see at what rate it would be dampened, but that involved much more arithmetic (since the distance between conductor and magnet would change) and was more precarious and inexact than my final method. This final method found the velocity necessary to create a set force and was very similar to fluid eddy currents. It was based on the premise that a terminal velocity would be met at the speed necessary to create the object’s downward, gravitational force since at a force of zero, the weight would no longer accelerate.
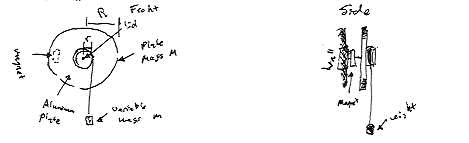
In the final set-up I used a large, aluminum cylinder which was attached to a backing by ball bearings. The aluminum cylinder also had a smaller lid attached to it. This smaller lid gave me an adequate spot to tie the string, which was used to create the force. Here is a diagram of the setup:
Diagram 2.1
(Notice the difference in R and r, also M and m)
TOC
For my actual experiment I first had to find the frictional force because that would have worked in unison with the eddy currents, making them seem larger. I did this by checking the time it took several different weights to drop starting from an angular velocity of 0 rad/s. I knew the average and initial velocities, so I could calculate the final velocity. From those knowns, I found the angular acceleration (since gravity suggests it is constant) and then could determine the torque. These are the steps I took to form the equation for net torque (what I observed):
D s/D t = vav
2*D s/D t = vfinal
wfinal= vfinal/r
wfinal-wo = D w (remember wo = 0)
D w/t = a
I = ½MR2 (for a uniform cylinder like mine)
t net = I a
Plug it all in and you get:
t net = ½MR2*2*s/rt/t = MR2s/rt2
To find the frictional torque I needed to subtract the net torque from the supplied torque. The supplied torque is created by the tension in the string and since it is accelerating downward, the tension is mg-ma. Here is the equation I used to determined the supplied torque:
t sup = rF (since the lid was circular the force would always be tangential)
t sup = r(mg-ma) = r(9.8m-2s/t2m)
The frictional torque would then be:
9.8rm - 2s/t2m - MR2s/t2 = t fr
I next went through the experiment by using a base-mass of 100 grams and adding 5, 15, 30, 50, 75 gram weights, remembering to start timing the second the weight was released.
Data Table 2.1
TOC
Control Data
(No Magnetic Field)
Time
Mass
Net
Supplied
Frictional
Average
Seconds
Grams
Nm
Nm
Nm
Friction
1
7.12
100
0.030720911
0.032830477
0.0021
0.001517
2
7.28
100
0.02938538
0.03284247
0.0035
3
7.12
100
0.030720911
0.032830477
0.0021
Max
4
7.12
100
0.030720911
0.032830477
0.0021
Friction
5
7.16
100
0.030378619
0.03283355
0.0025
0.0035
1
6.82
105
0.033483074
0.034445955
0.0010
2
6.97
105
0.032057417
0.034459398
0.0024
Min
3
6.91
105
0.032616547
0.034454126
0.0018
Friction
4
6.87
105
0.032997467
0.034450534
0.0015
-0.0015
5
6.93
105
0.032428556
0.034455898
0.0020
1
6.6
115
0.035752483
0.037703085
0.0020
2
6.5
115
0.036861021
0.037691637
0.0008
3
6.62
115
0.035536782
0.037705313
0.0022
4
6.53
115
0.036523107
0.037695127
0.0012
5
6.5
115
0.036861021
0.037691637
0.0008
1
6.25
130
0.039868881
0.042572822
0.0027
2
6.1
130
0.041853753
0.04254965
0.0007
3
6.12
130
0.041580646
0.042552838
0.0010
4
6.18
130
0.040777174
0.042562219
0.0018
5
6.19
130
0.040645529
0.042563755
0.0019
1
5.82
150
0.045977792
0.049040197
0.0031
2
5.66
150
0.048613984
0.049004687
0.0004
3
5.76
150
0.046940651
0.049027227
0.0021
4
5.65
150
0.048786221
0.049002366
0.0002
5
5.73
150
0.047433463
0.049020589
0.0016
1
5.31
175
0.055233814
0.0570681
0.0018
2
5.25
175
0.056503515
0.057048146
0.0005
3
5.16
175
0.058491758
0.0570169
-0.0015
4
5.26
175
0.056288877
0.057051519
0.0008
5
5.25
175
0.056503515
0.057048146
0.0005
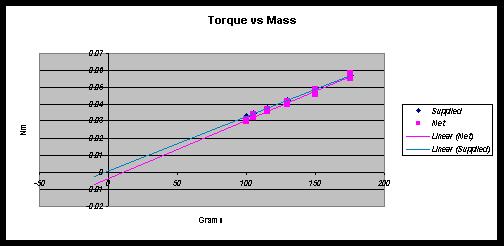
Graph 2.1
TOC
I believe that my Frictional Torque of 0.001517 Nm makes sense, also the graph 1.1 is logical (Supply is always greater than net torque and net toque crosses at zero). However, the difference in between supplied torque and net torque is coming closer as the weight increase. I don’t think that this is because the frictional force is decreasing, although it may be, but that it is a manifestation of human error. As you might be able to tell, the deviation in between times for the larger masses is a larger percentage. This error makes sense because shorter times make my constant reaction time a larger percentage. Before I decided to use this value, I also confirmed it to be right by a rough experiment where I tried to spin the aluminum disc at 1 rad/s and timed the deceleration. My answer for this rough experiment was about 0.0005 Nm, which is with in the margin of error, ± 0.0035 Nm.
Now that I have successfully found the frictional torque, I can move on to the heart of my experiment and find the terminal velocity at which a given weight will fall when a magnet is placed a known distance from the aluminum plate. The set up is almost exactly the same as above except the distance I start timing from is 2.07m instead 2.159. This is so that the weight will have enough time to accelerate to its terminal velocity. The force of the eddy current should be the same as the net force down not minus the tension since at the terminal velocity the object is no longer accelerating and F=ma. The net torque will be the new supplied torque (t sup = 9.8rm) minus the value I calculated for friction (0.00108 Nm). The only new formula I would need is one that related distance and time to angular velocity:
D s/D t = v
v/r = w
thus D s/(D t*r) = wI next went through the experiment by using a base-mass of 97 grams and adding 5, 15, 30, 50, 75 gram weights, remembering to start timing after the weight had passed the disc bottom (giving time to accelerate). To measure the magnet spacing I wanted to be very accurate, but the micrometer was of course steel (not good for magnets). I decided to cut small pieces of cardboard which were 0.05" thick (1.27mm). I placed these up against my aluminum plate and then used their thickness to find the right spot for my magnet. The distances I chose were 0.1", 0.15", 0.2", 0.25", 0.3" and 0.35" I excluded 0.05" because it was too close to accurately measure.
Data Table 2.2
TOC*Each velocity is an average of 5 speeds
Eddy Current Torque and Angular Velocity
(Magnet at varying distance)
Magnet
Eddy Current
Average Terminal
Distance
Torque
Ang. Velo.
Meters
Nm
rad/s
0.00254
0.030102246
1.693164347
0.00254
0.031757564
1.768825179
0.00254
0.0350682
1.929592334
0.00254
0.040034154
2.18405335
0.00254
0.046655426
2.534766261
0.00254
0.054932016
2.963325779
0.00381
0.030102246
2.962253319
0.00381
0.031757564
3.100033284
0.00381
0.0350682
3.397408218
0.00381
0.040034154
3.795094006
0.00381
0.046655426
4.386323158
0.00381
0.054932016
5.054913275
0.00508
0.030102246
4.482044274
0.00508
0.031757564
4.674010473
0.00508
0.0350682
4.848506554
0.00508
0.040034154
5.497726942
0.00508
0.046655426
6.209711925
0.00508
0.054932016
6.960174202
0.00635
0.030102246
6.332018651
0.00635
0.031757564
6.552241886
0.00635
0.0350682
7.09547696
0.00635
0.040034154
7.920755657
0.00635
0.046655426
9.075675142
0.00635
0.054932016
10.38512012
0.00762
0.030102246
7.314144453
0.00762
0.031757564
7.766945168
0.00762
0.0350682
8.68422059
0.00762
0.040034154
9.518161442
0.00762
0.046655426
10.97015674
0.00762
0.054932016
12.52617788
0.00889
0.030102246
8.185465818
0.00889
0.031757564
8.808413927
0.00889
0.0350682
9.631231378
0.00889
0.040034154
10.9227176
0.00889
0.046655426
12.45932534
0.00889
0.054932016
14.38439572